
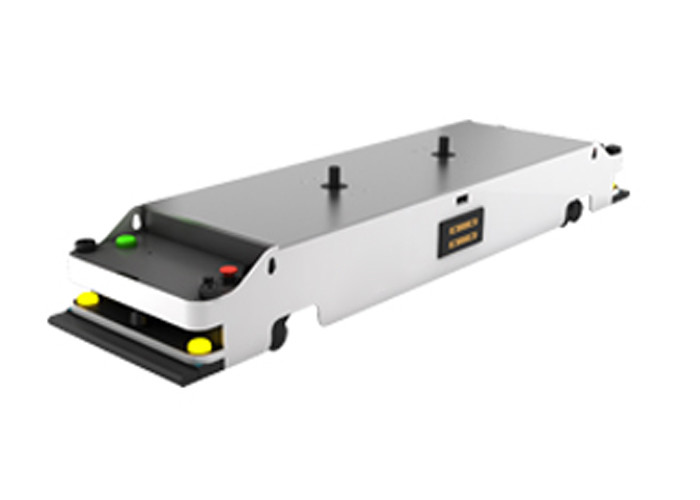



潜伏AGVはボディ高さが限られた環境で作り出し、限られたギャップの環境で自由に移動できるAGVを参照する。それが空のとき最も近い道を選ぶことができる潜伏AGVの主要な特徴は絶妙、適用範囲が広く、転換の効率を非常に改善する。
二重方向潜伏牽引AGVはトロリーによって理性的に接続でき、材料フレーム、自動電気持ち上がる棒の使用し接触、指名場所への牽引の貨物を理性的で物質的な配分を達成する対面運転、掛ける。AGVの配分は安定し、正確、そして非常に適用範囲が広い。前方および後方の回転、分岐点の歩行、5000KGまでの最高の牽引の重量である場合もある。
| 基本的な変数 | 全体寸法L*D*H (mm) | 1850*435*330 |
| サービス重量(kg) | 260 | |
| 表示 | 持ちなさい | |
| 容量(kg) | 1000 | |
| 運行モード | レーザーの運行、視覚運行 | |
| 操作の形態 | 手動、自動 | |
| ドライブ モード | 二重差動ドライブ | |
| 安全性能 | レーザーの障害回避 | 区域の安全レーザー |
| 衝突棒検出 | 前後半分の環境衝突のストリップの検出 | |
| 非常停止ボタン | 前後非常停止ボタン | |
| 音響工学警報 | 持ちなさい | |
| 働き性能 | Max.drivingの速度(ロード/アンロード) (m/s) | 0.45/0.6 |
| 移動モーター(W) | 200*4 | |
| 停止する精密(mm)を | ±10 | |
| 移動方向 | 、左右に前方および後方、分岐点の選択回る | |
| 電池の性能 | 電池の電圧(V) | 48V |
| 電池容量(ああ) | 40AH | |
| 充満周期(n)の数 | 1500 | |
| 第一次充満の評価される働く状態の下の作業時間(h) | 4-6 | |
| 充満時間(h) | 2-3 | |
| 充満板の設置モード | 側面2の電極 | |
| 充満モード | 自動 |
![]()
![]()












